
|
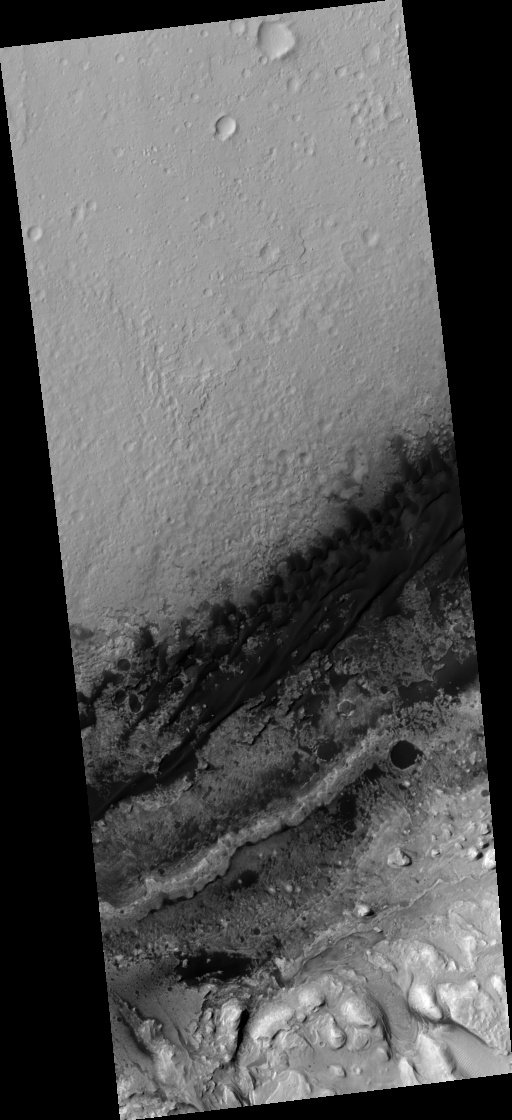
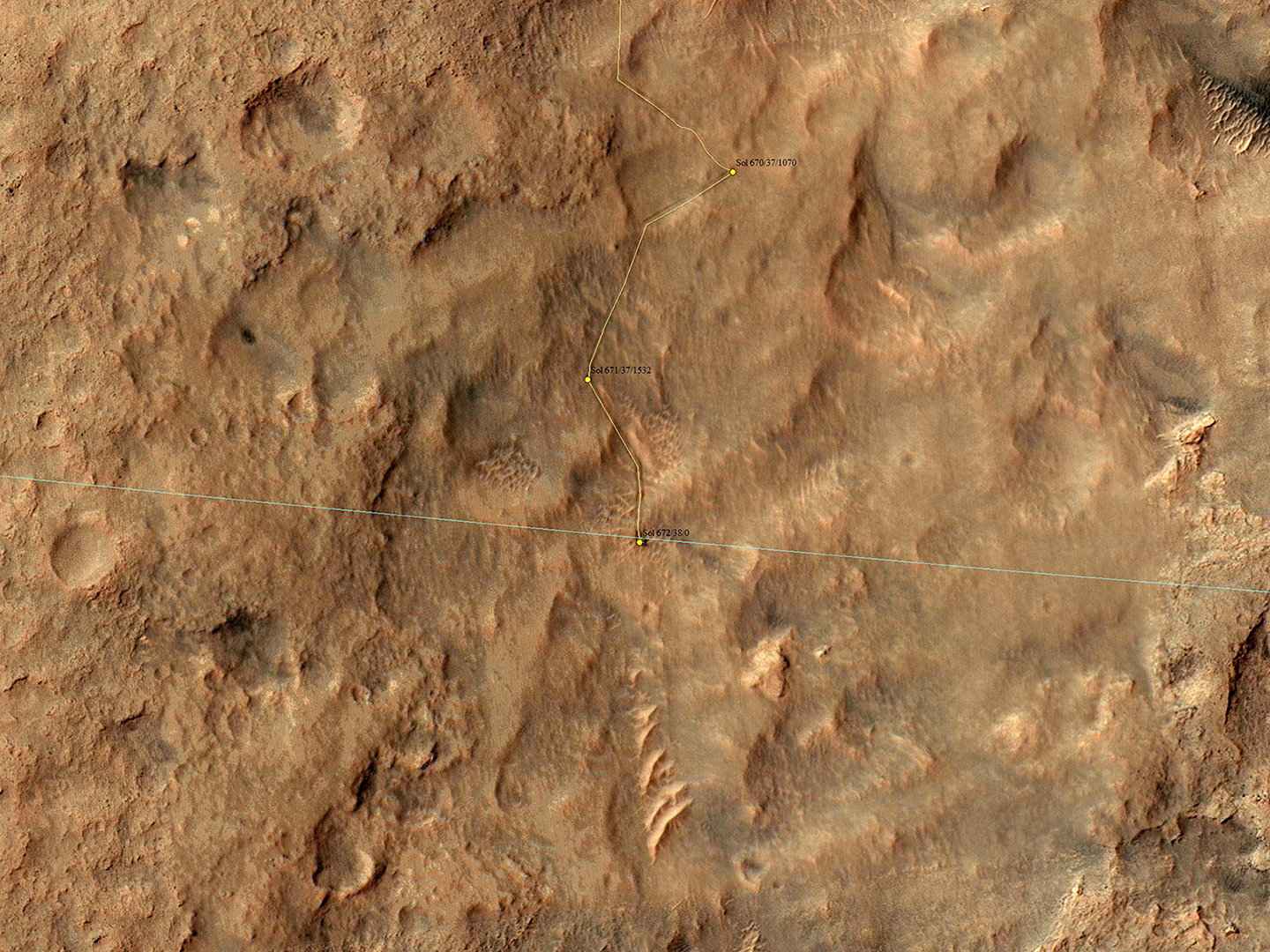
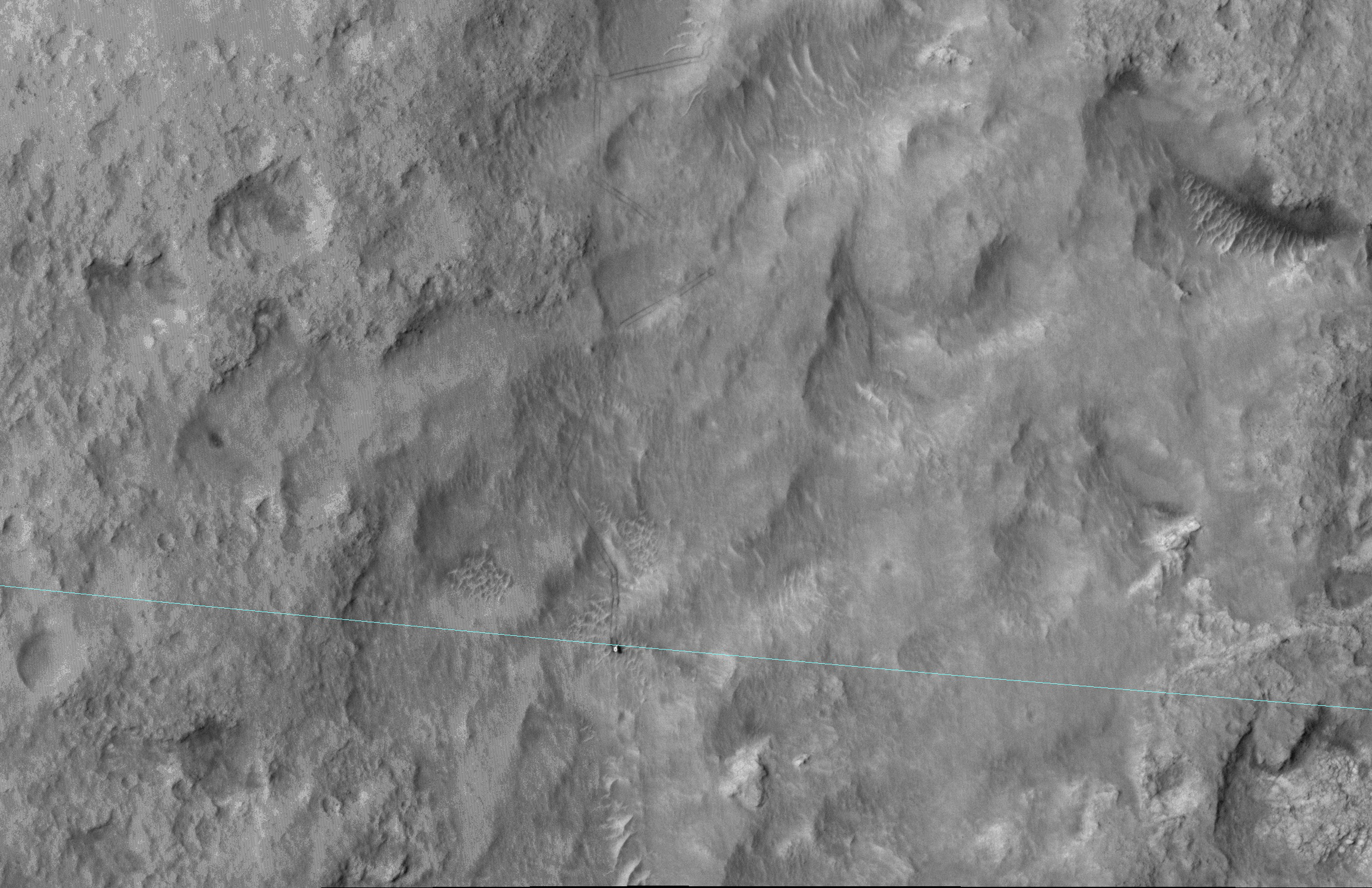
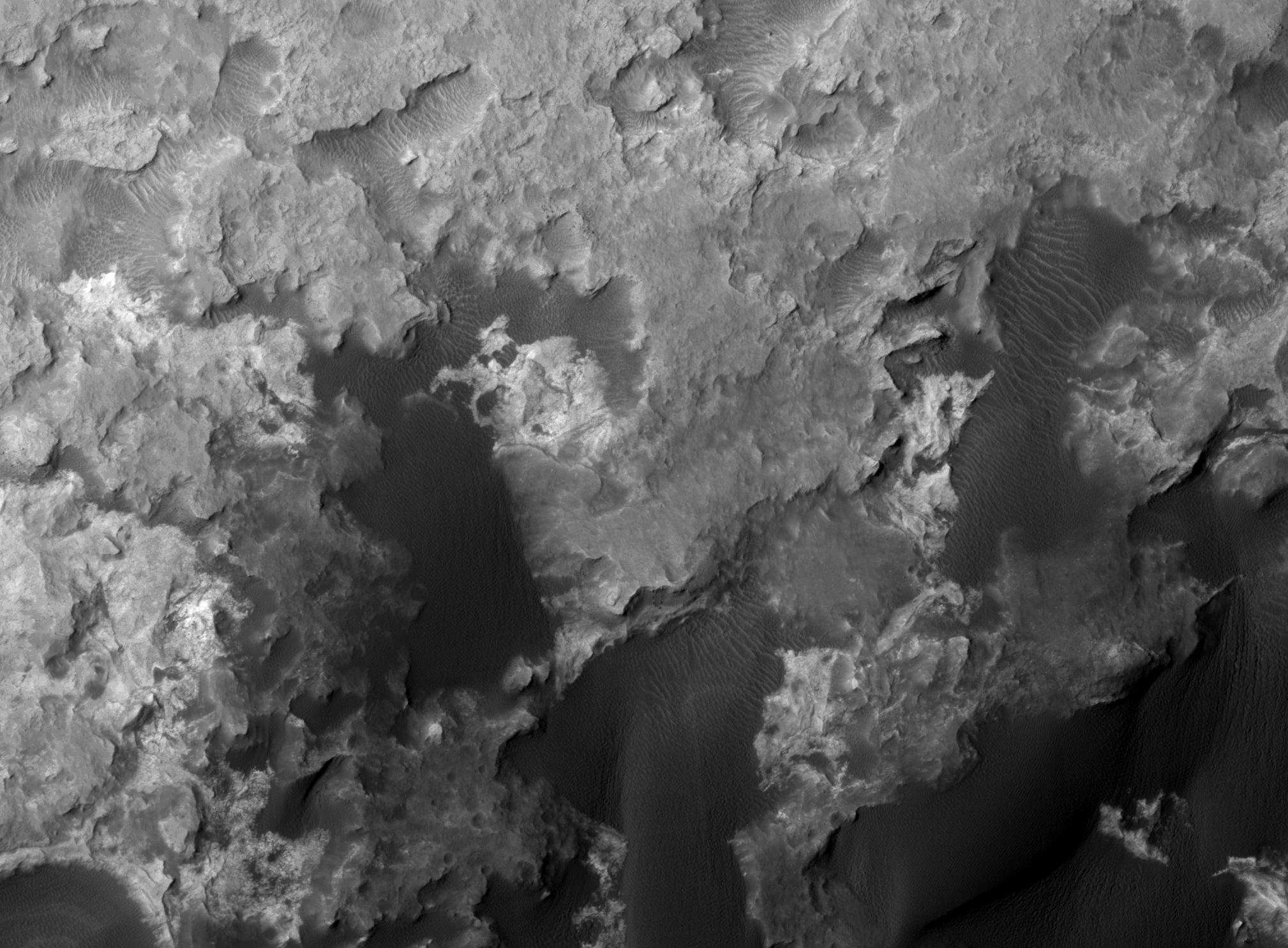
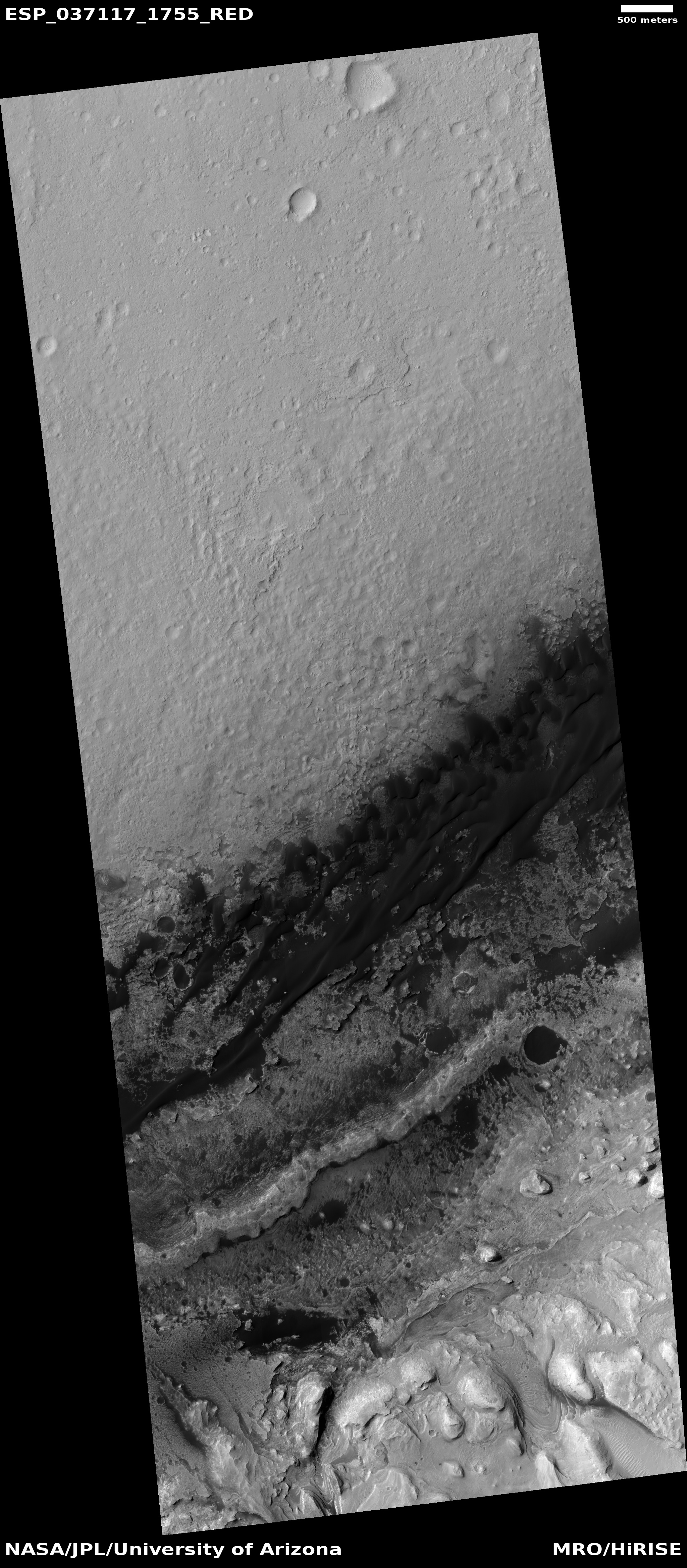
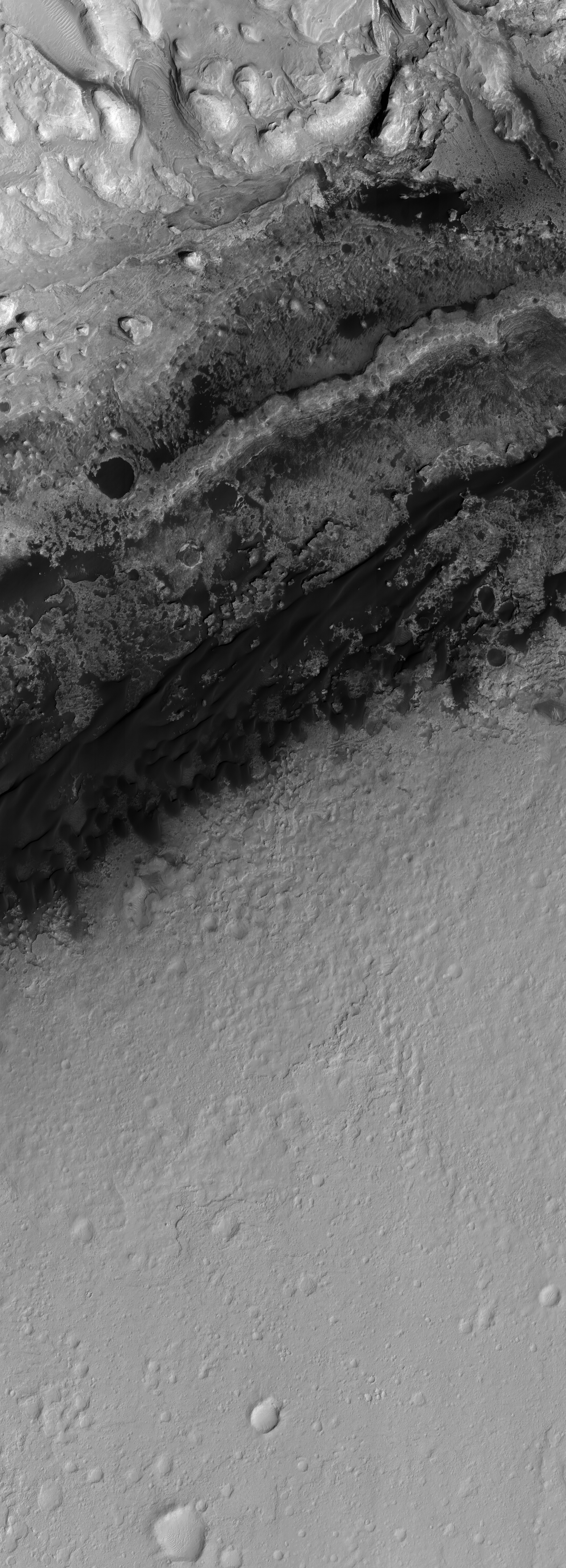
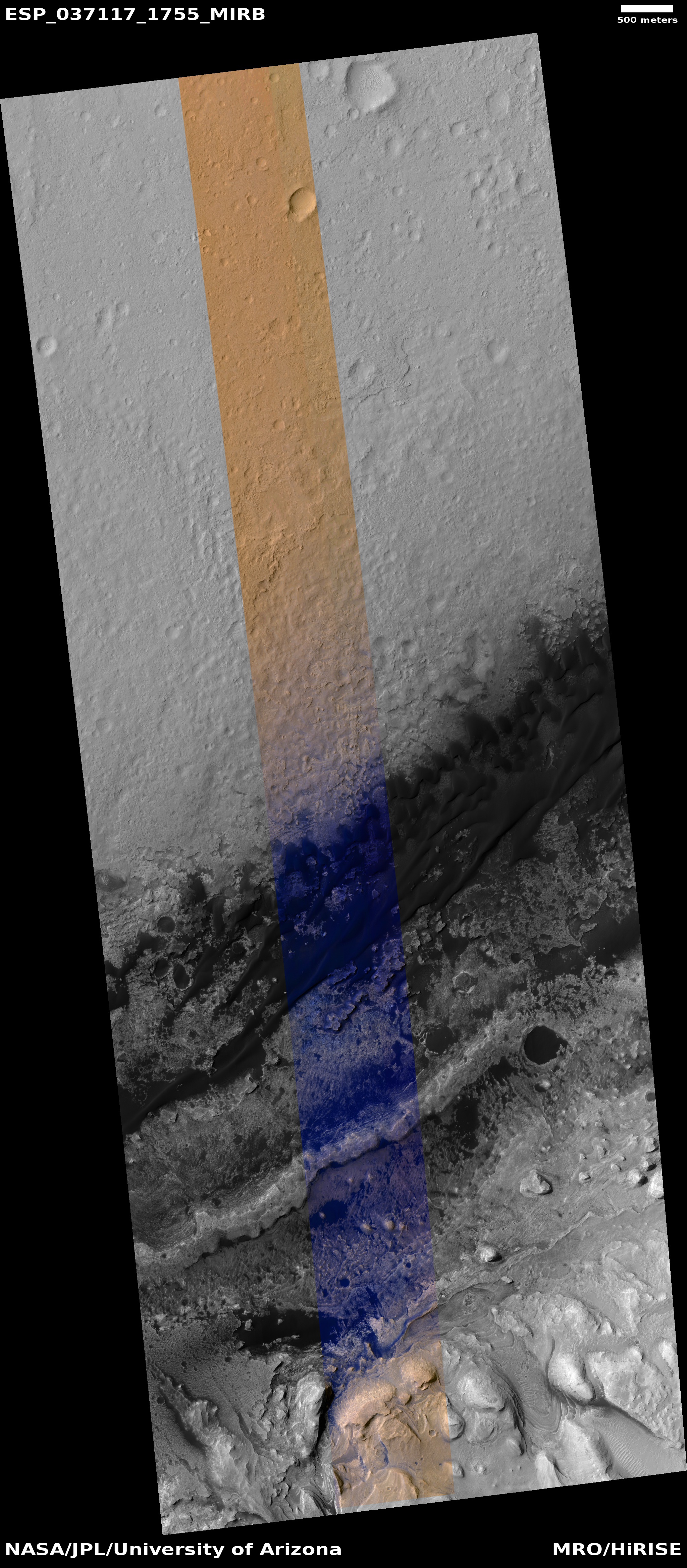
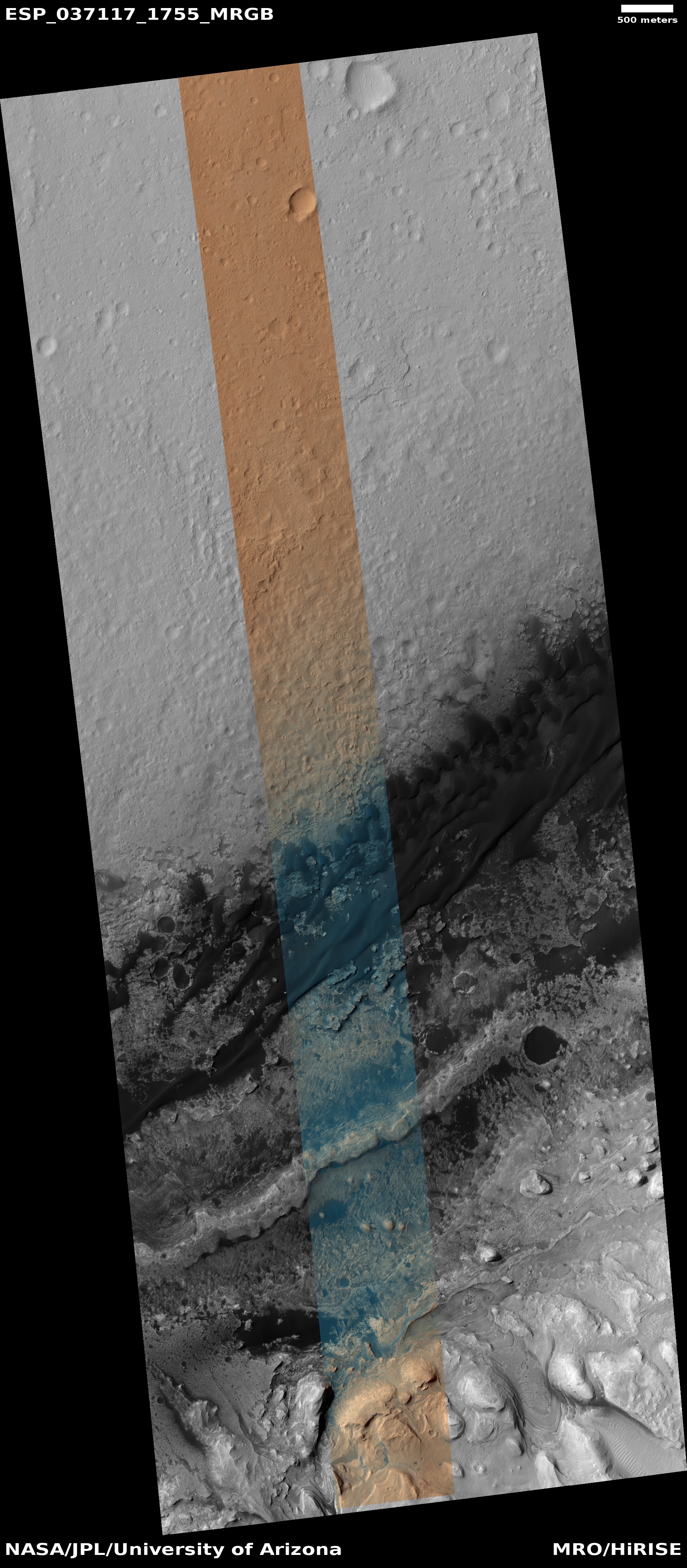
Fecha de adquisición: 27 de junio de 2014 Hora de Marte: 3:44 PM Latitud (centro): -4.7° Longitud (Este): 137.4° Distancia al objetivo: 277.1 km Escala de la imagen original: 27.7 cm/pixel (con 1 x 1 binning) así los objectos de 83 cm de lado son resueltos Escala en la imagen proyectada: 25 cm/pixel y el norte está hacia arriba Proyección cartográfica: Rectangular Ángulo de emisión: 14.1° Ángulo de fase: 45.5° Ángulo de incidencia Solar: 58°, y el Sol está localizado 32° encima del horizonte Longitud Solar: 152.5°, verano del norte |
JPEG
Blanco y negro proyectado no proyectado Color IRB: proyectado no proyectado Colores combinados IRB: proyectado Colores combinados RGB: proyectado Color RGB: no proyectado JP2 PARA DESCARGAR Blanco y negro: proyectado (811 MB) Colores IRB: proyectado (491 MB) JP2 EXTRAS Blanco y negro: proyectado (381 MB), no proyectado (423 MB) Color IRB: proyectado (149 MB) no proyectado (389 MB) Colores combinados IRB: proyectado (204 MB) Colores combinados RGB: proyectado (195 MB) Color RGB: no proyectado (376 MB) |
Etiquetas para los productos Blanco y negro Color Colores combinados IRB Colores combinados RGB Productos EDR Productos fotográficos “Arrastrar y soltar” para HiView, o haz clic para descargar. Política para las imágenes Todos las imágenes que están disponsibles en este sitio no tienen restricciónes para usarlas. Si Ud. es un miembro de la prensa, pedimos que Ud. incluye un aviso: Imagen: NASA/JPL-Caltech/UArizona Adendo El Jet Propulsion Laboratory (JPL) de la NASA es el encargado de dirigir la Mars Reconnaissance Orbiter. La cámara ha sido construida por Ball Aerospace & Technologies Corp., y su funcionamiento está controlado por la Universidad de Arizona. |
|
Inicio Catálogo HiClips HiFlyers HiRISE Inglés Contacto beautifulmars at uahirise dot org |
Lunar & Planetary Laboratory College of Science University of Arizona MRO NASA/JPL Agencia Espacial Mexicana ESA España |
High Resolution Imaging Science Experiment HiRISE Operations Center 1541 E. University Blvd Tucson, Arizona 85721 United States © 2026 Arizona Board of Regents |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}