
|
Data di acquisizione
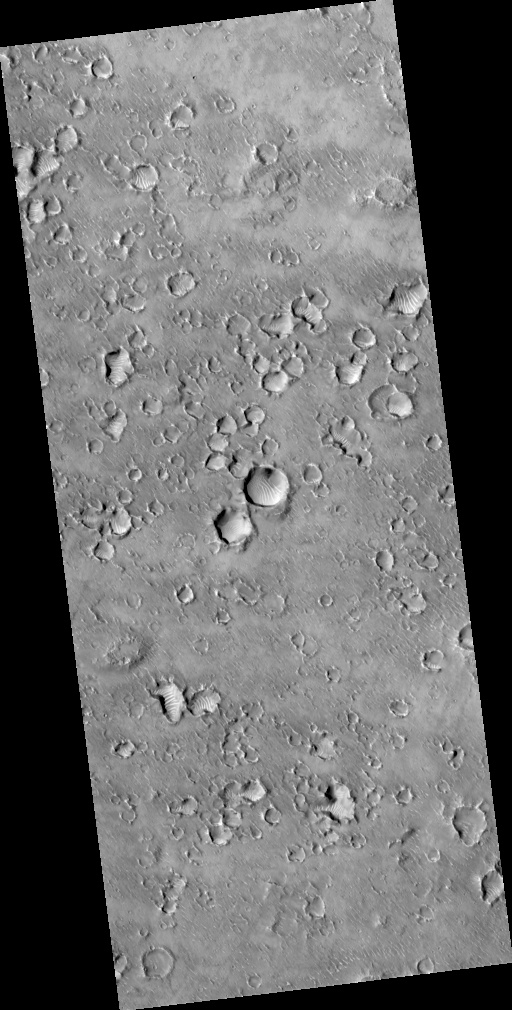
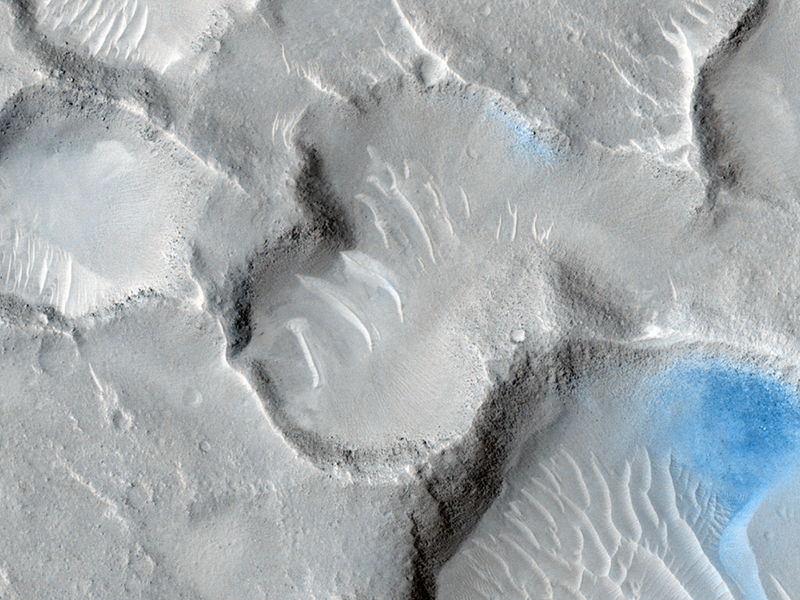
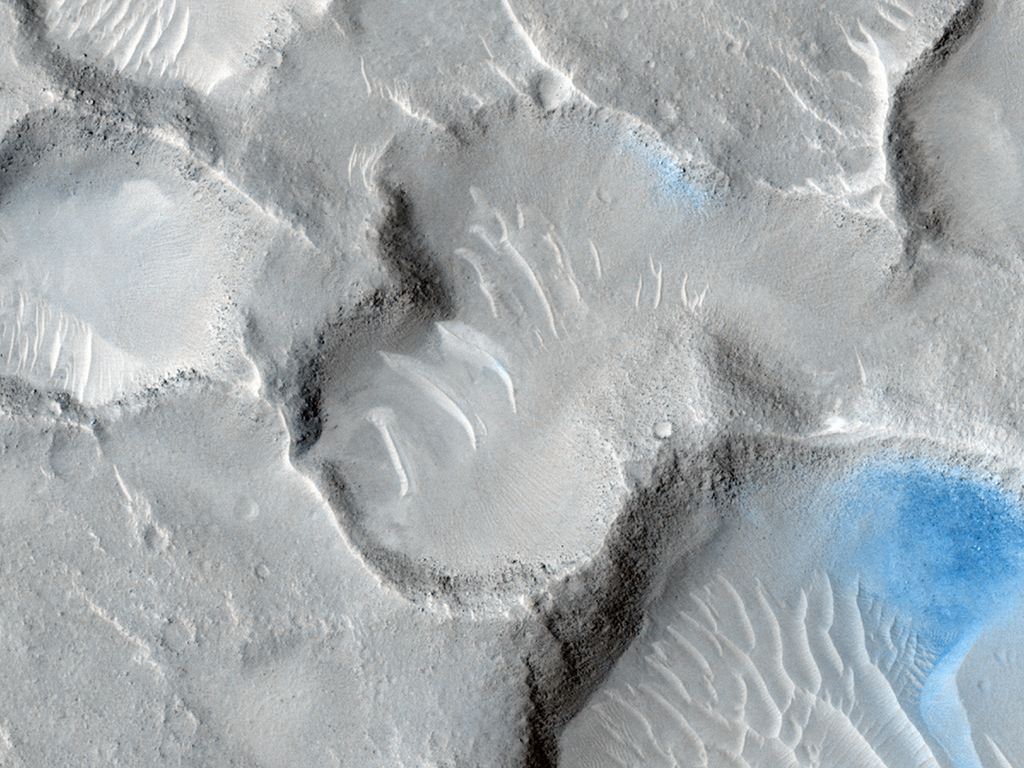
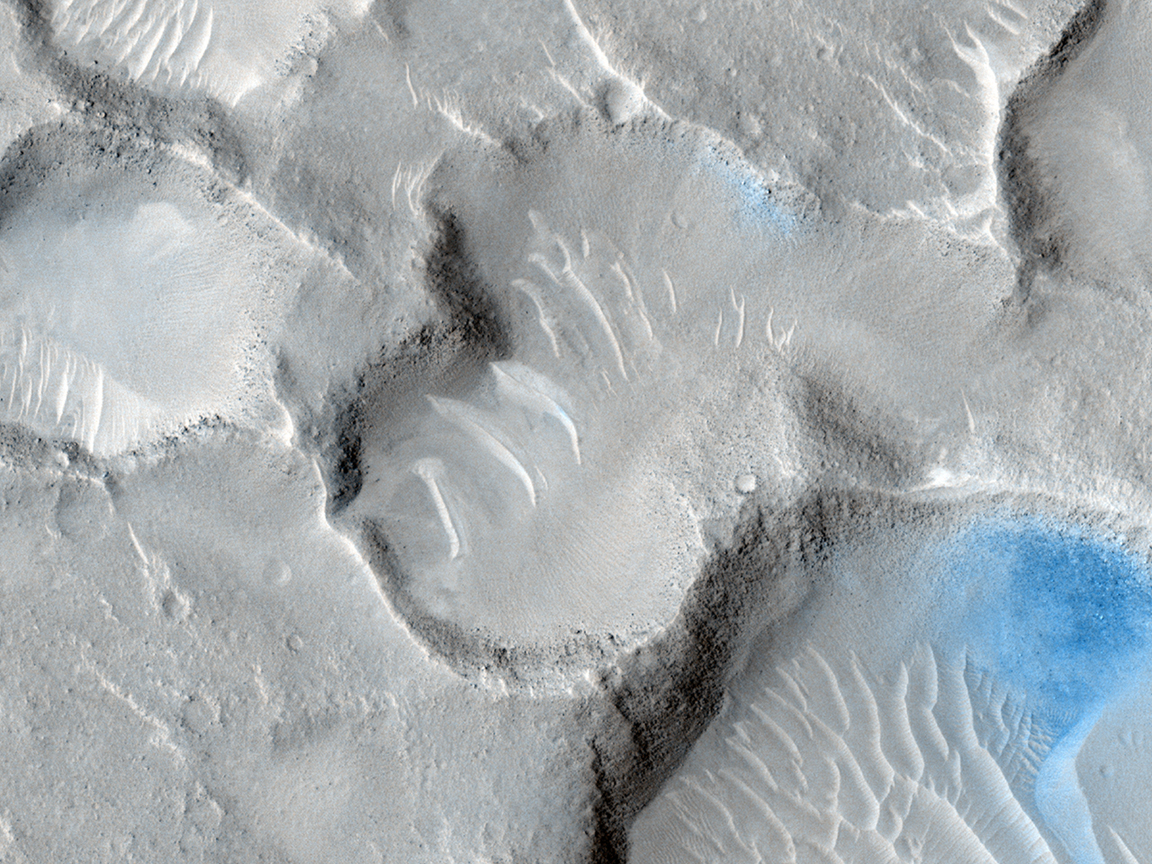
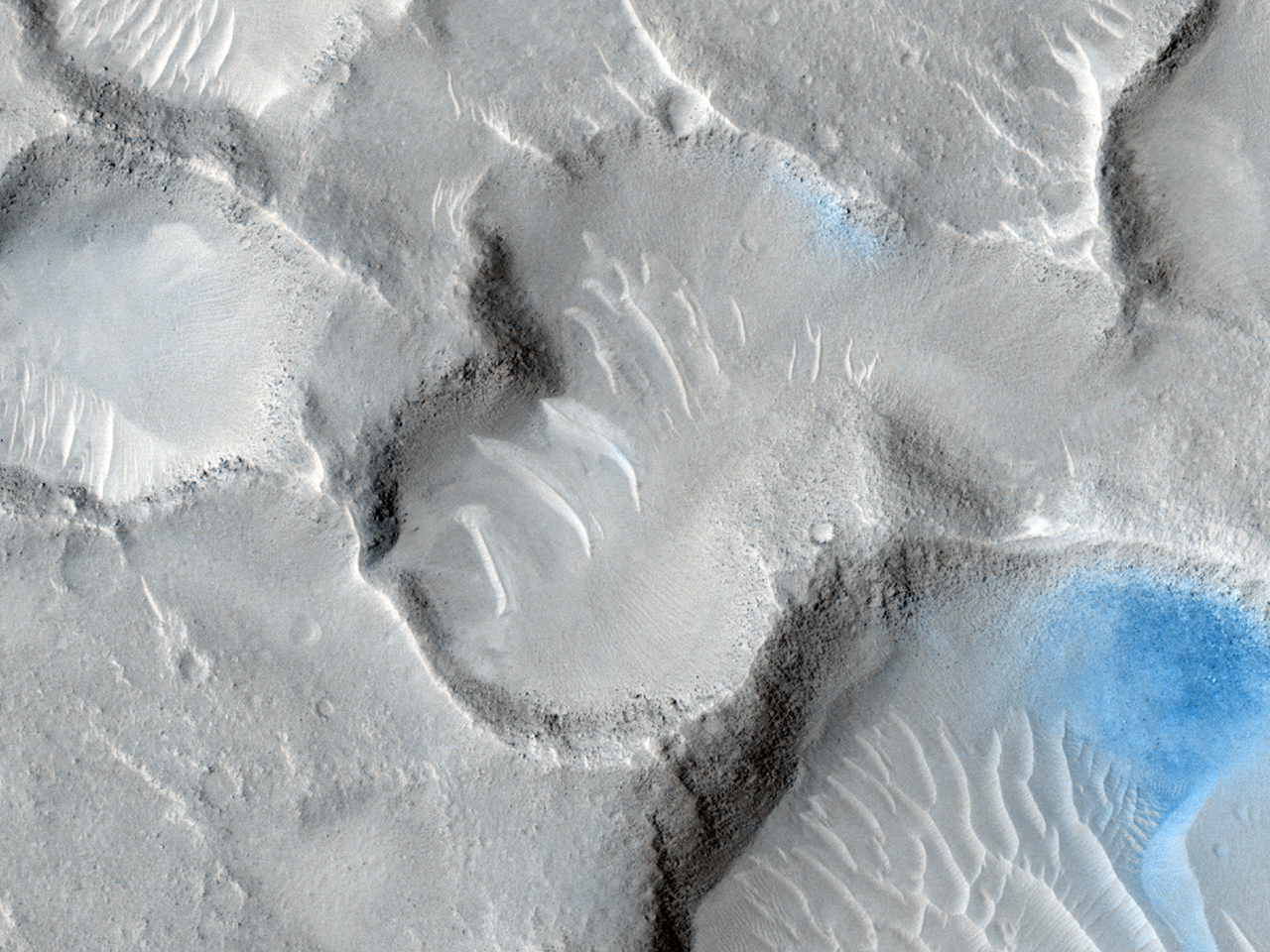
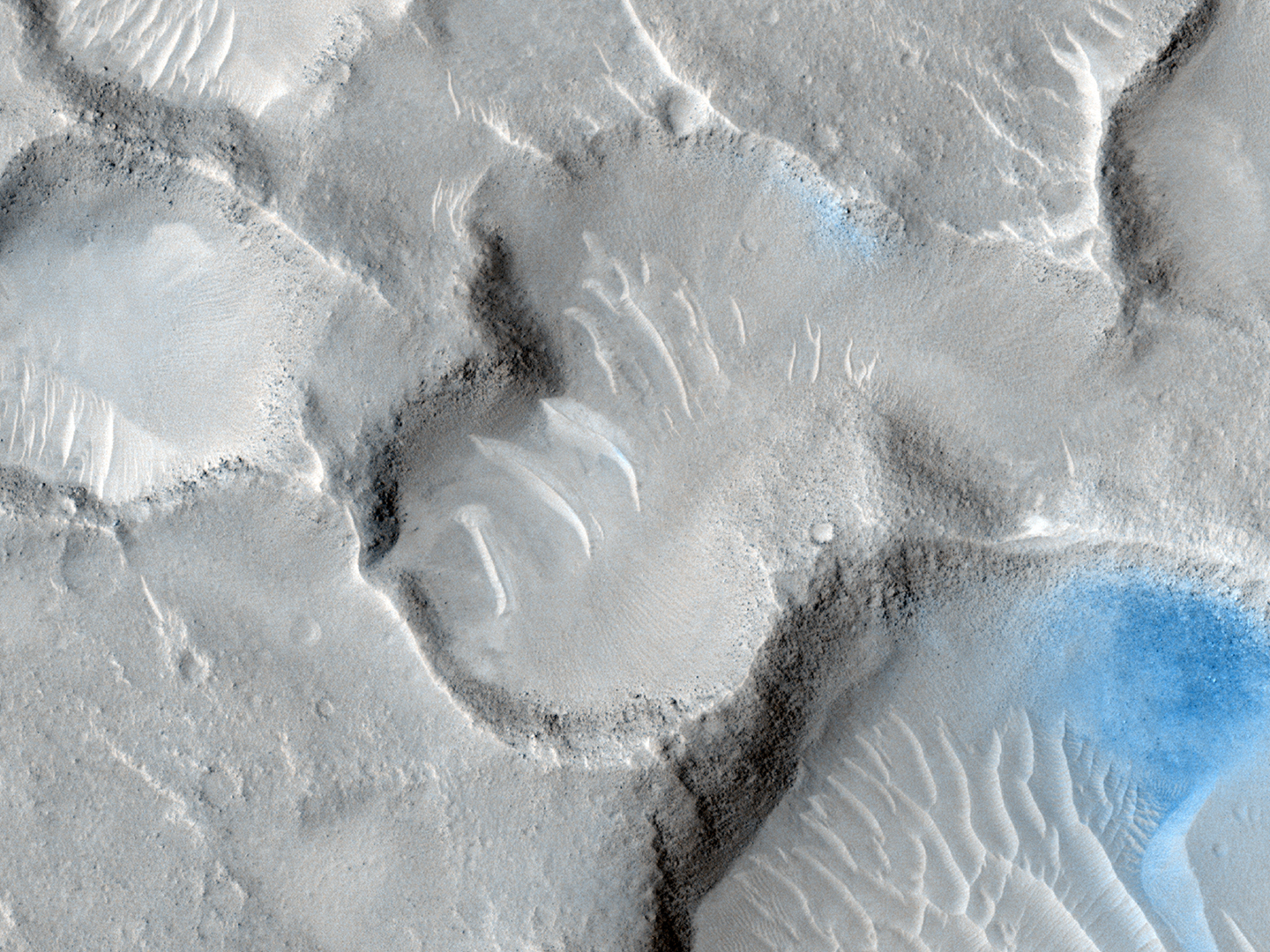
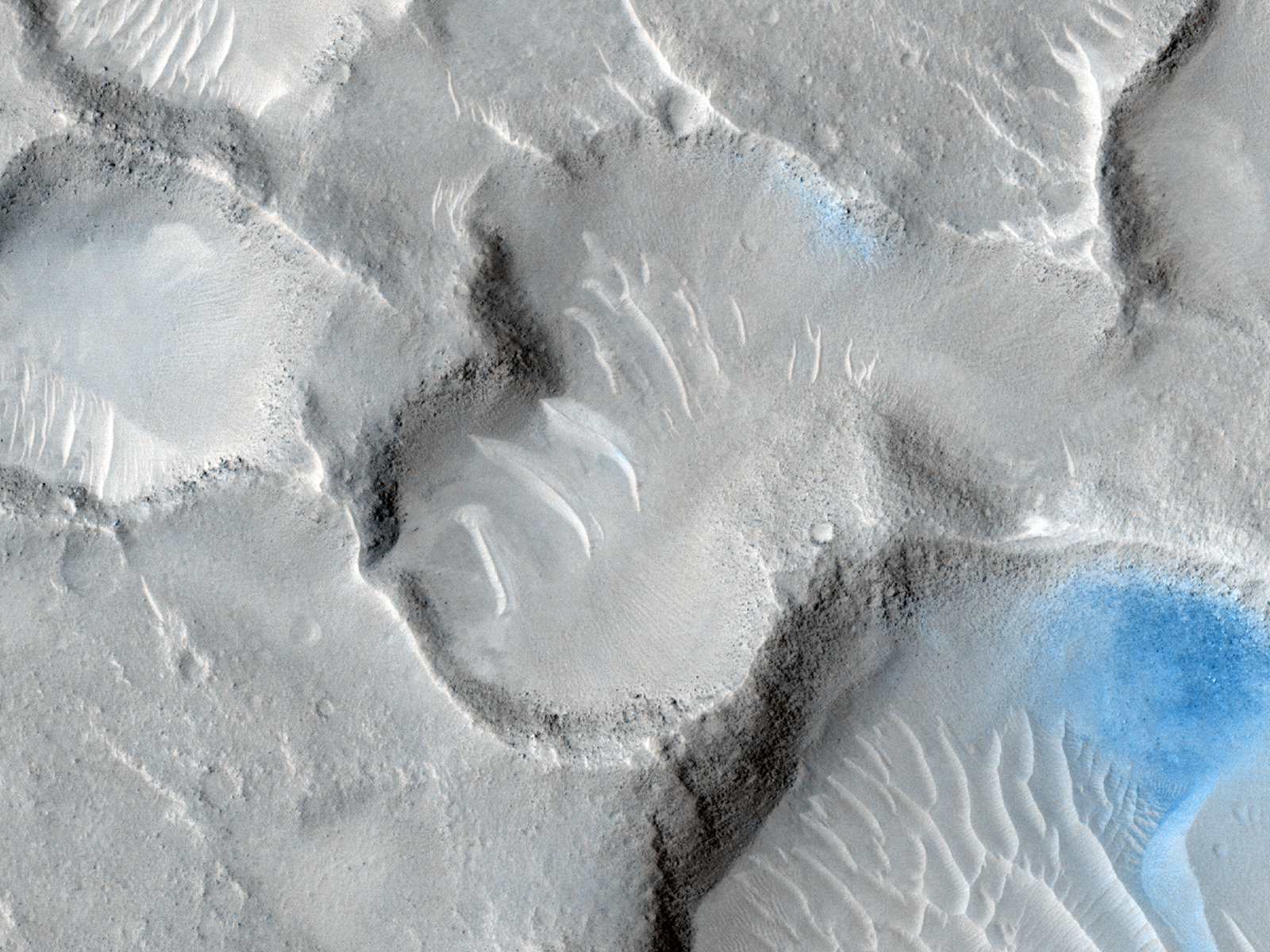
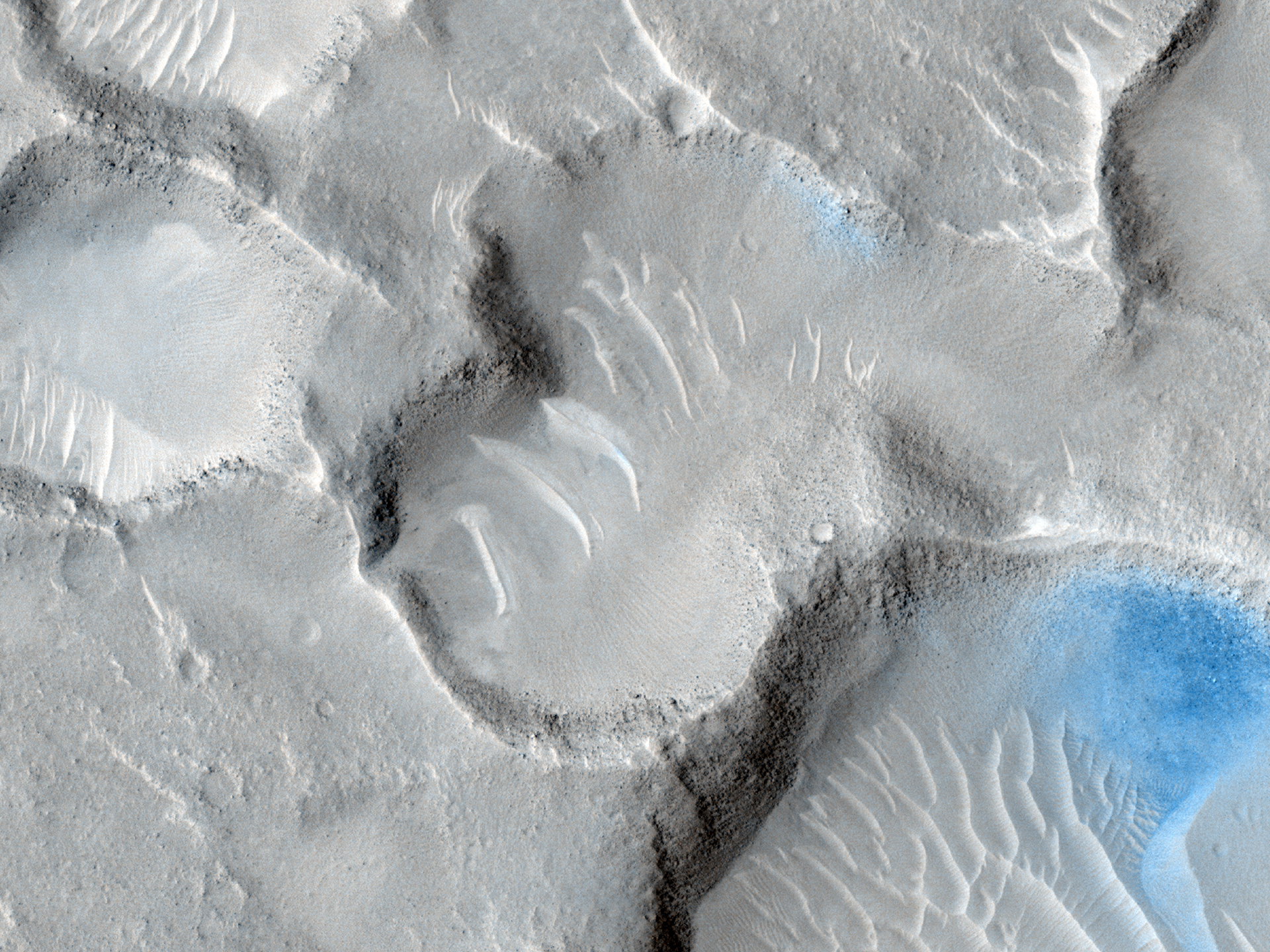
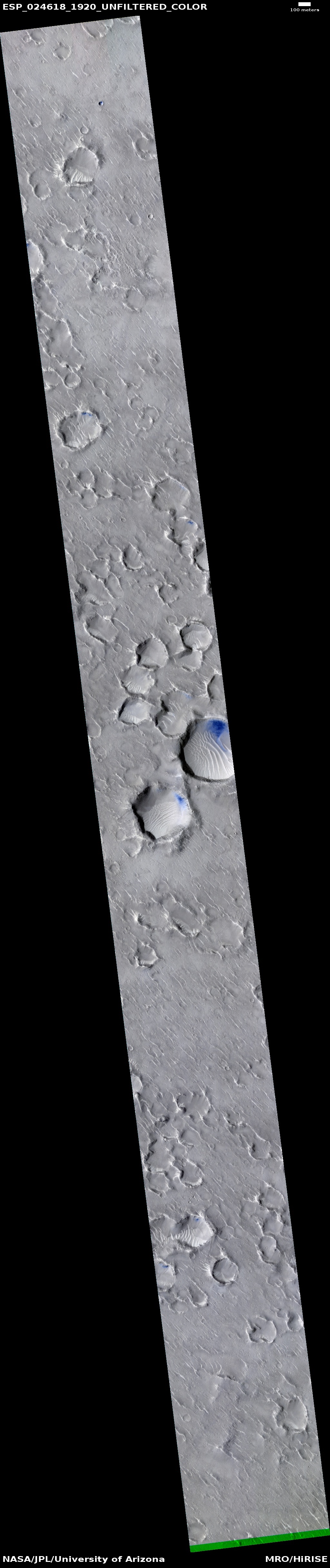
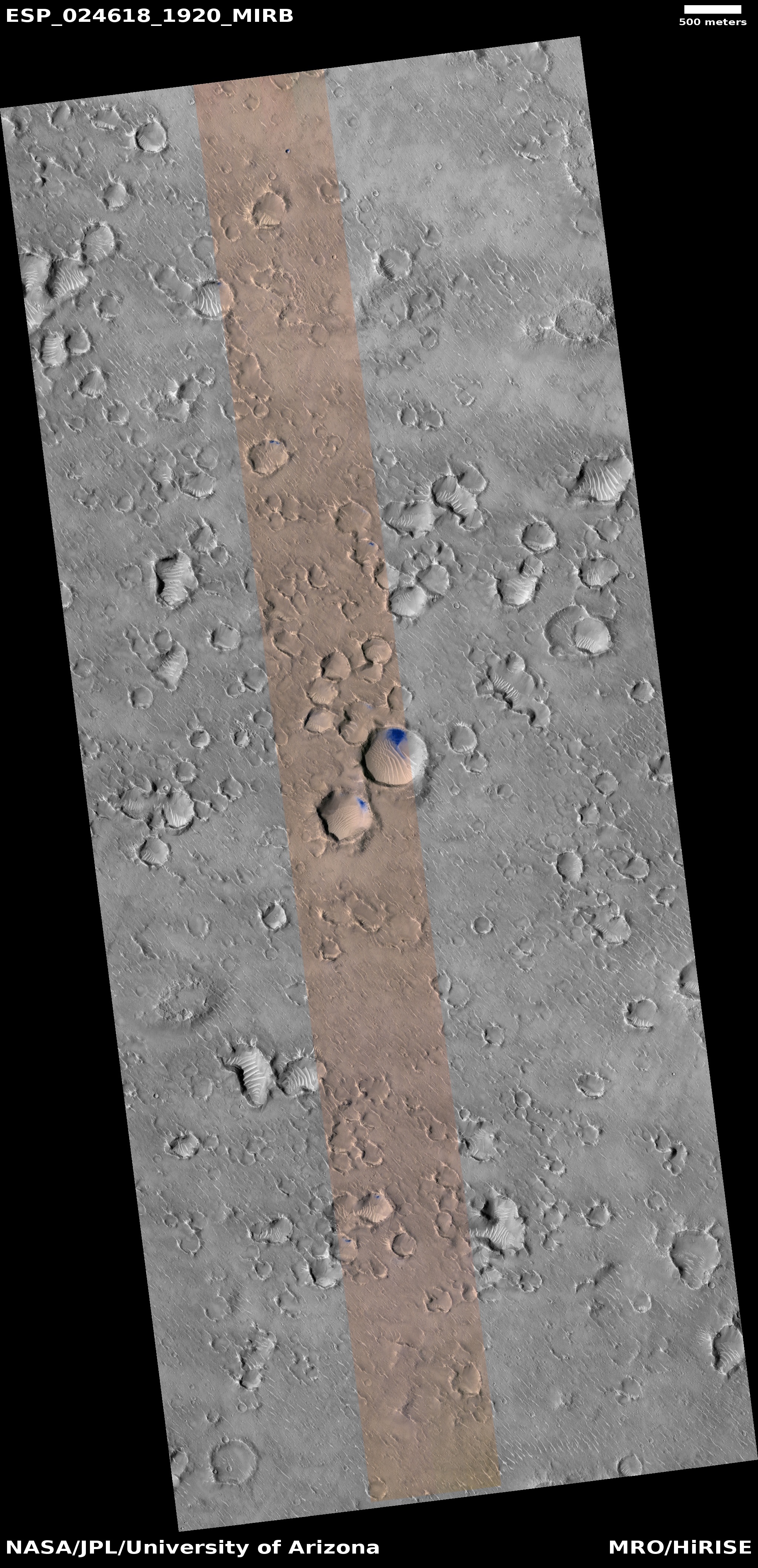
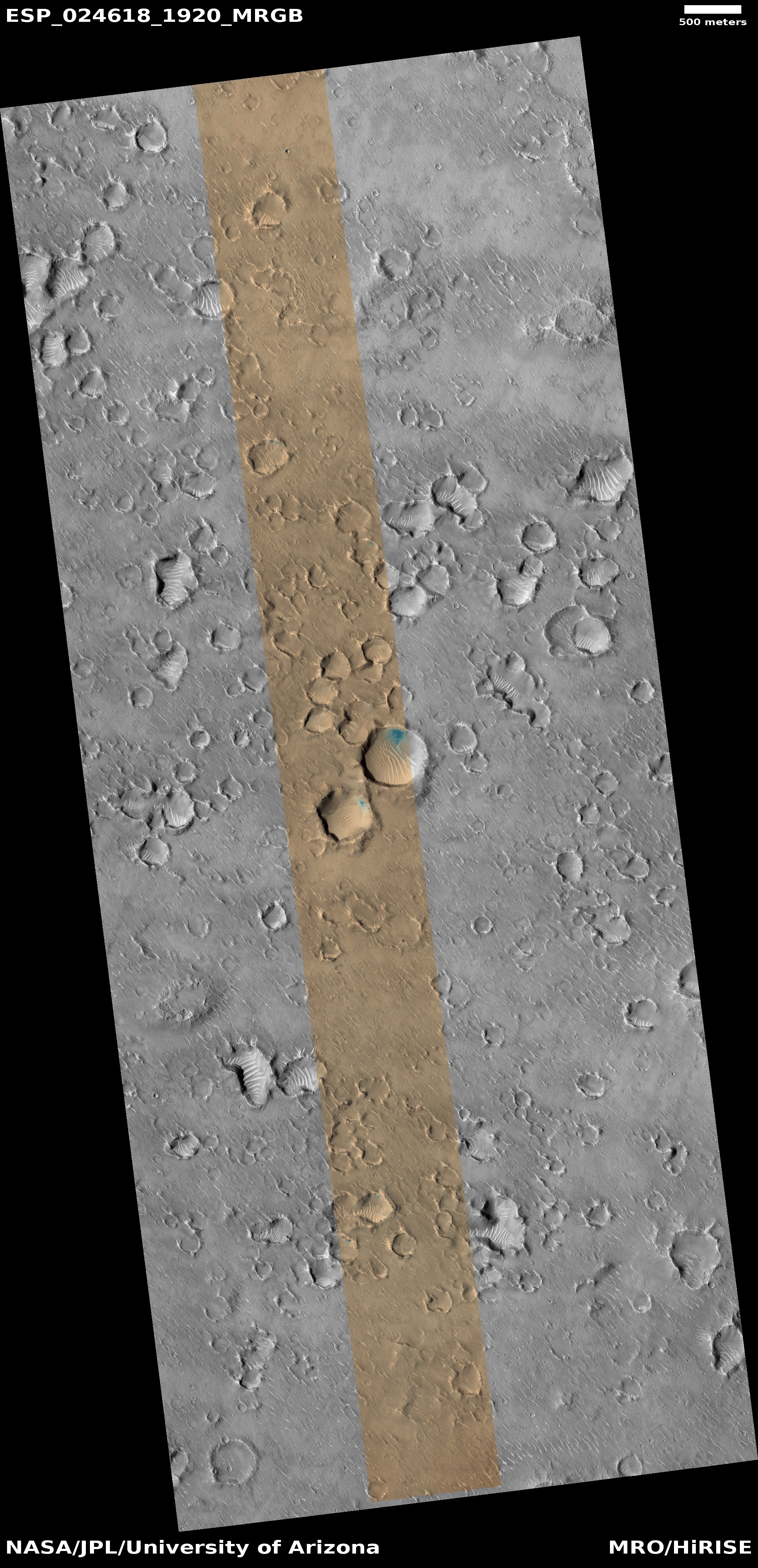
27 ottobre 2011 Ora su Marte 2:26 PM Latitudine (centrata) 11.7° Longitudine (Est) 90.6° Altitudine della sonda 280.3 km Scala originale dell’immagine 28.0 cm/pixel (con 1 x 1 binning) e gli oggetti di 84 cm attraverso sono risolti Scala dell’immagine proiettata: 25 cm/pixel Immagine proiettata Equirettangolare (e il nord è su) Angolo di emissione 7.4° Angolo di fase 43.5° Angolo di incidenza del Sole 36°, e il Sole è localizzato 54° sopra l’orizzonte Longitudine solare 21.3°, primavera settentrionale |
JPEG
Nero e bianco: proiettato non proiettato Colore IRB: proiettato non proiettato Colori combinati IRB: proiettato Colori combinati RGB: proiettato Colore RGB: non proiettato JP2 per scaricare Nero e bianco: proiettato (796 MB) Colore IRB: proiettato (389 MB) JP2 EXTRAS Nero e bianco: proiettato (352 MB) non proiettato (436 MB) Colore IRB: proiettato (138 MB) non proiettato (344 MB) Colori combinati IRB: proiettato (209 MB) Colori combinati RGB: proiettato (201 MB) Colore RGB: non proiettato (335 MB) |
Etichette per i prodotti Nero e bianco Colore Colori combinati IRB Colori combinati RGB Prodotti EDR Prodotti fotografici “Drag & drop” per usare con HiView, oppure clicca per scaricare. NB IRB: Infrarosso–rosso–blu RGB: Rosso–verde–blu Addenda Il Jet Propulsion Laboratory della NASA dirige la sonda MRO. La fotocamera fu costruita da Ball Aerospace & Techologies Corp., e il suo progetto è realizzato dall’Università dell’Arizona. |
|
Inizio Catalogo HiClips HiFlyers HiRISE Inglese Contatto beautifulmars at uahirise dot org |
Lunar & Planetary Laboratory College of Science L’Università dell’Arizona MRO NASA/JPL Agenzia spaziale italiana ESA Italia |
High Resolution Imaging Science Experiment HiRISE Operations Center 1541 E. University Blvd Tucson, Arizona 85721 United States © 2024 Arizona Board of Regents |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}